LIDAR
Environments
Role • Filmmaker, Editor
Timeline • 2 weeks
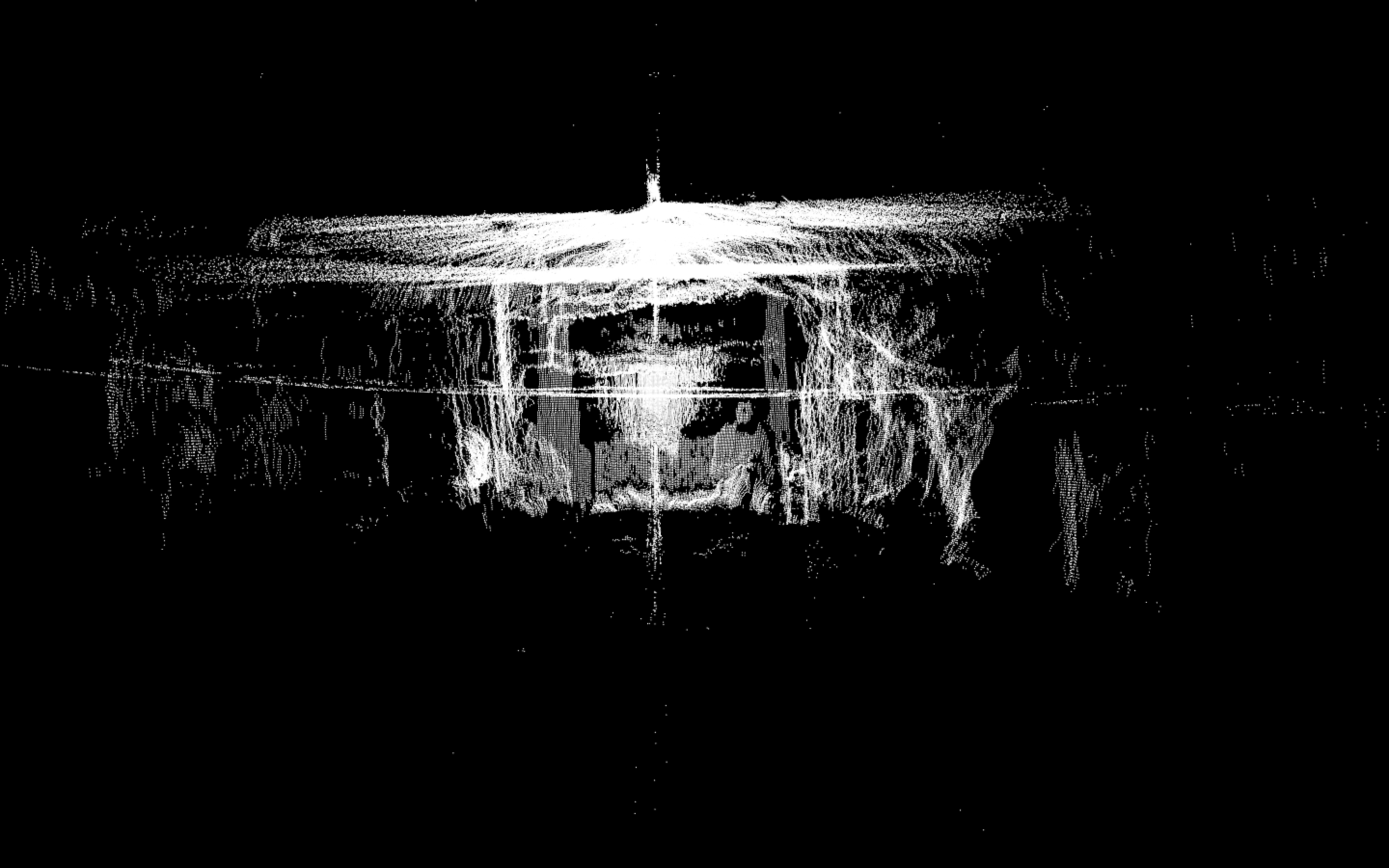
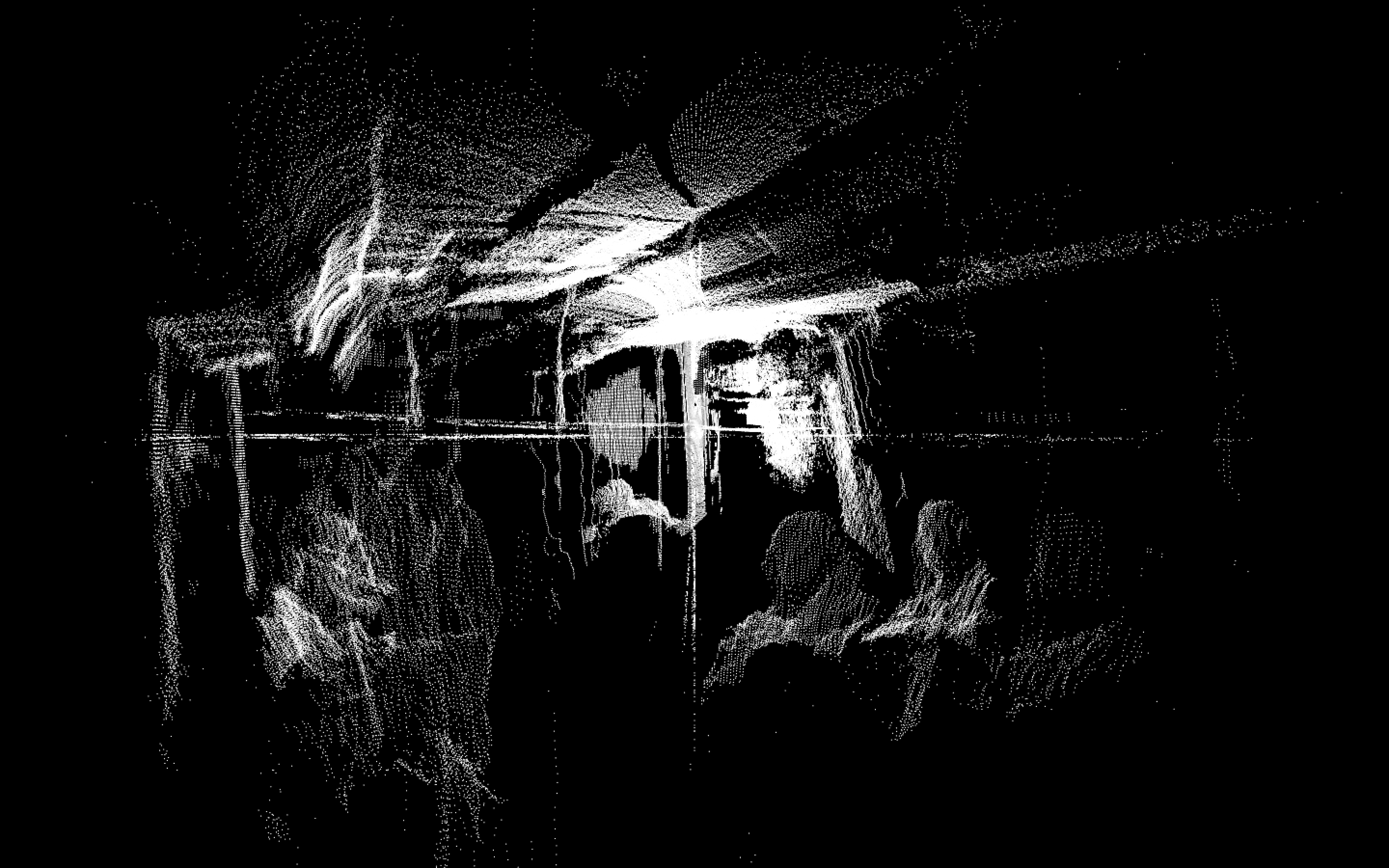
LIDAR is a range sensing technology that measures distance to a target by illuminating it with a laser beam. By measuring the time of flight of each light pulse, we are able to recreate an accurate depth map of the scene. It is typically employed by the military to survey the land from above.
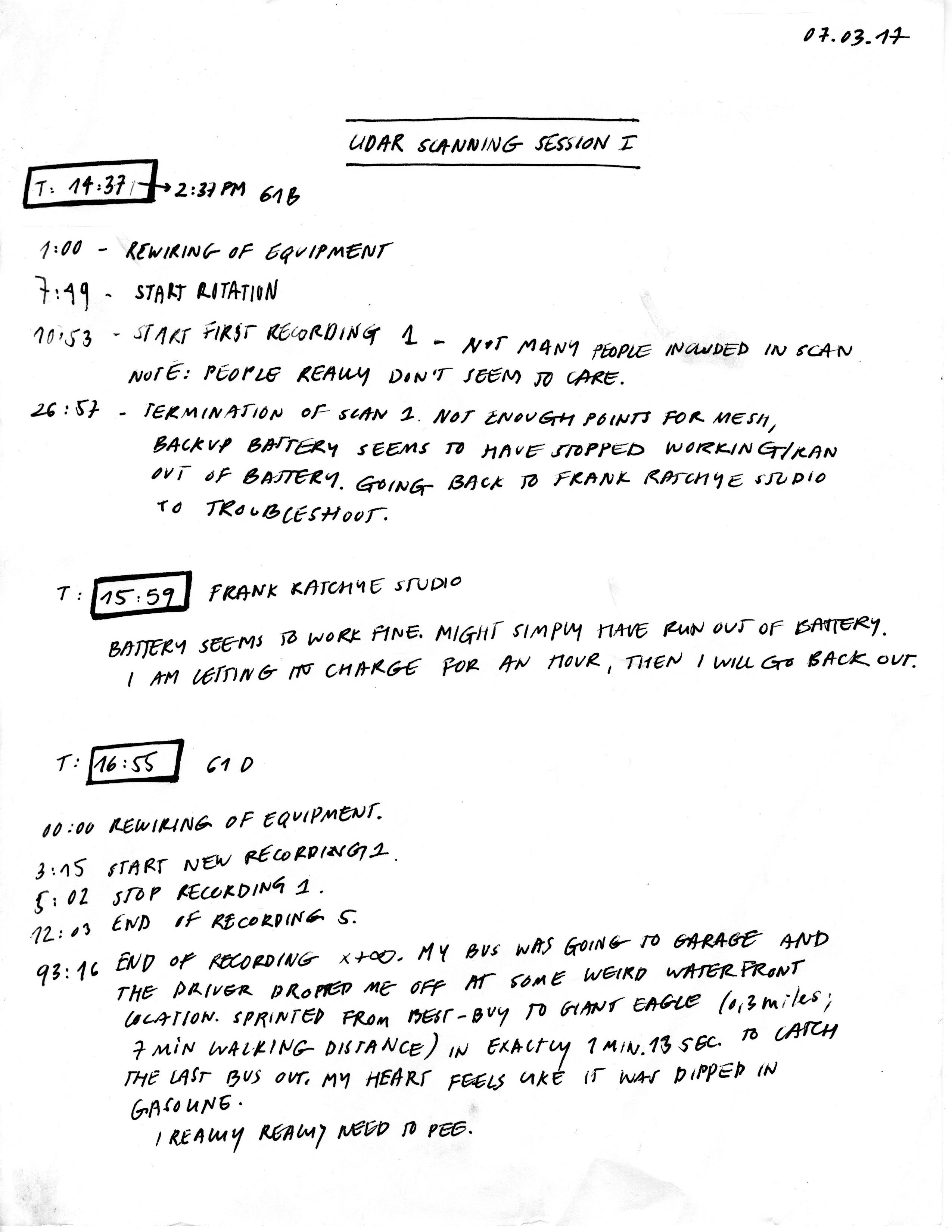
This project is a topographical study of the inside of a Pittsburgh bus. I was interested in the line between proximity and distance which connects strangers in public places. Behavior and thought can be translated through position, stare and reaction to physical contact. I tried to capture human behavior by the means of a three-dimensional point mesh. The LIDAR ables you to see through space and beings, providing a more truthful depiction of the environment and its inhabitants.
STILL FRAMES

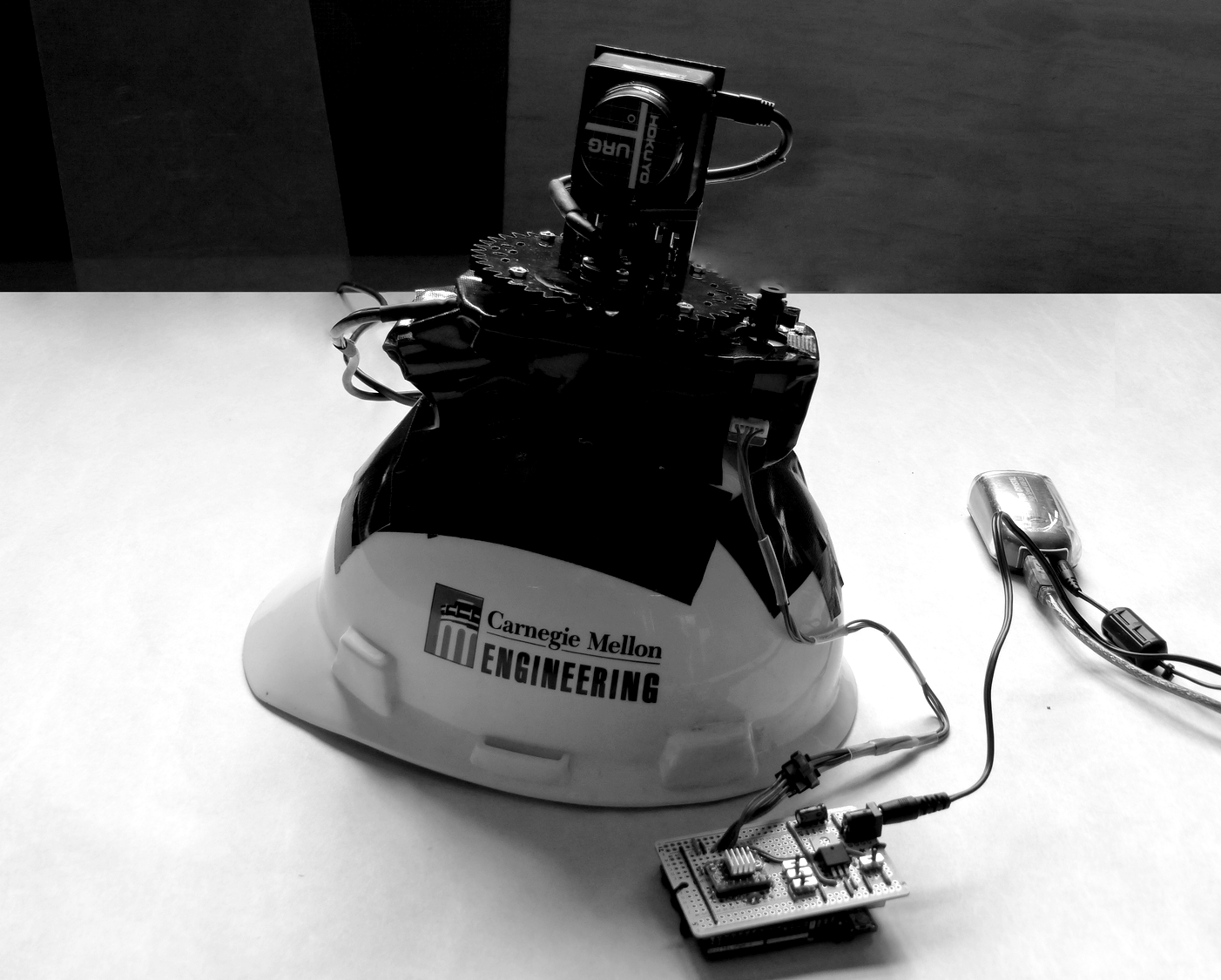
PROCESS
In order to capture the bus' environment in the most naturalistic way possible, I needed to make sure I would not intervene in the scene as an observer. I therefore had to find a way to exclude myself from the 360° scan. I achieved my goal by taping the LIDAR and its rotation rig to a Carnegie Mellon Environmental Engineering hard hat and carrying the 10 pound uninterruptible power supply in my backpack. I then recorded the audio with a binaural microphone. Many thanks to Ben Snell for his incredible help and for giving me access to his previously written urg_recording_and_display_2 and Dan Moore's ofxURG.

Festival version:
This website and its content is copyright of Chloé Desaulles, unless stated otherwise. All rights reserved.
© Chloé Desaulles, 2022